Ручка номер 6. Эксперимент, автомат на два стержня.

Чисто «на слабо», с целью проверки, смогу или нет, сваял шариковую ручку под два стержня.
Идея несложная, две «конфликтующие» защелки. Включая одну, выбиваешь из фиксатора другую.
Для сверления в заготовке двух каналов, параллельных и симметричных относительно основной оси вращения цилиндра, был придуман вот такой способ:
В токарный патрон станка, со смещением зажимается дополнительный патрон. Смещение путем подкладки подобранной металлической пластины под один из кулачков (большого патрона):
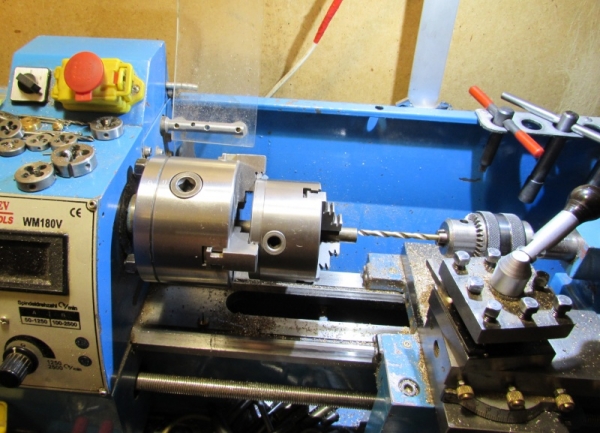
А на малом патроне есть разметка, две точки ровно через 180 град. Точка точно совмещается с удобным местом прицеливания (гранью кулачка большого патрона), и сверлится первое отверстие:

Затем, не вынимая деталь из малого патрона, слегка ослабляется большой патрон, и «под прицел» подводится вторая точка на малом патроне. И можно сверлить второе отверстие:

Почему так сложно? Потому что так я могу сколько угодно раз переходить от обработки одного отверстия к другому, и каждый раз точно попадать в настройку. Просверлить оба на одну глубину тонким сверлом, затем рассверлить на меньшую глубину вторым диаметром, и даже спрофилировать точную ступеньку фрезой:

И вся внутренняя геометрия обоих отверстий будет идентичная. Особенно, если точную глубину каждой операции, обеспечивать не лимбом станка, а упором патрона в деталь. Тут уж точно не промахнешься )
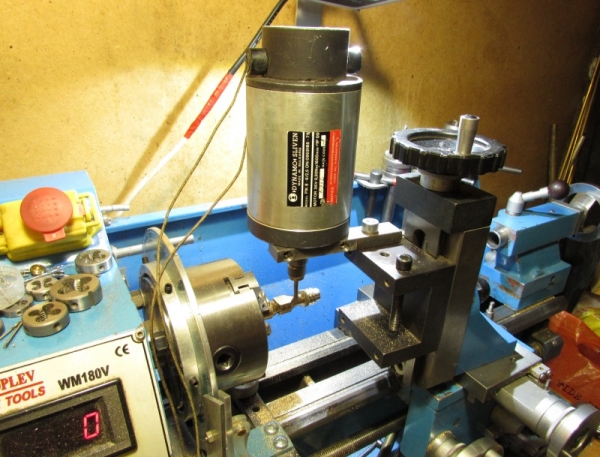
Фрезеровка больших плоскостей на самой сложной детали:
Результат:

На самом деле, как надо механизм заработал только со второй попытки. Первый вариант:

Идея взаимодействия защелок была правильная, но выталкивание предыдущего стержня происходило уже в конце «рабочего хода» — а в этот момент в передней части ручки, рабочие концы стержней уже встречались между собой, и застревали.

Надо, чтобы первый стержень отскакивал в самом начале движения второго стержня. Исправить первый вариант не удалось, пришлось делать заново.
Вобщем, для меня этот проект оказался на самой грани реализуемости. В смысле, такие механизмы уже не делаются интуитивно, без тотальной проработки точных чертежей, с моделированием взаимодействия всех движущихся частей. Пару раз я был готов все бросить и признать поражение.
Обычным способом, на резьбе, такой корпус уже нельзя собирать, стержни при свинчивании половинок перекрутятся. Поэтому собирается ручка своеобразным цанговым зажимом, с тонкой накидной гайкой:

Разбирается только двумя
Механизм:

Взвод:

Фиксация:

Длина ручки 155 мм, вес 92 грамма.
Видео:
О, даже видео с первого раза вставить получилось! ))
22 комментария
+
Замечательная, интересная, ручка. +++
У меня есть и четырехкулачковый патрон с независимым движением кулачков.Теоретически им удобнее зажимать со смещением, но вот как раз многократные переустановки с точным возвратом к прошлой дырке, он не даст.
Первоклассная задумка и ее качественная реализация! Браво!