Антропоморфная механическая рука. Решение вопроса подвижности большого пальца или немного кинематики. Часть 1.

Доброго времени Народу Мастеровому!
Топик о том, как сделать антропоморфные механические кисти рук для фото и видеосъемок, для украшения интерьера и для того, чего фантазия пожелает :)
Как-то раз попросили нас изготовить для съемок механические кисти рук робота.
Требования к конструкции были такие, чтобы руки могли держать от ложки до пистолетной рукоятки. При этом, по сюжету съемок, потом эти кисти будут уничтожены, то ли взорвутся, то ли сгорят — точно уже не помним. А еще они должны быть изготовлены не из металла или фанеры, а из чего-то более легкоразрушаемого.

Ну что же, задача понятна, размеры рук известны, с материалами тоже определились, а вот с самой конструкцией придется поколдовать, ведь для того, чтобы руки могли держать разные предметы, большой палец нужно сделать таким же подвижным, как у человеческих рук.
Получается надо придумывать шарнир, дающий подвижность большому пальцу в точке крепления к ладони.
В общем на ноутбуке открываем САПР, запасаемся ножницами, клеем, чертежными принадлежностями, чертежной бумагой для шаблонов и начинаем творить и вытворять.

Сами поиски варианта шарнира описывать не будем, главное, что приемлемое решение было найдено и это радует.
Выкладывать чертежи с точными размерами тоже не станем, так как идея этого топика показать само решение вопроса шарнира большого пальца.
Ну, а каких размеров из каких материалов и в каком внешнем оформлении уважаемые Мастера решат сделать свой вариант механических рук — это уже дело вашего вкуса.

Из материалов нам понадобятся:
Гофрокартон листовой для изготовления
кончиков пальцев и нижних фаланг.
Листовой картон для изготовления ладоней,
средних фаланг и оснований больших пальцев.

Для осей фаланг и пальцев подойдет пластиковая трубка для крепления воздушных шаров диаметром 5 мм.
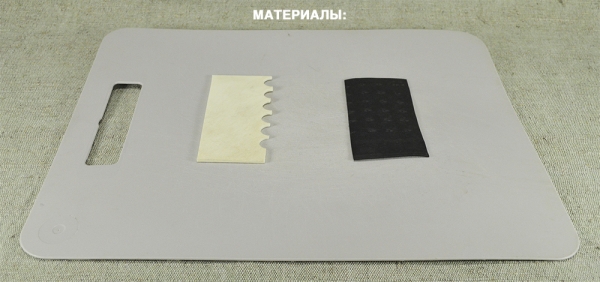
Ещё нам нужны кусок пластиковой разделочной доски и кусок тонкого пластика для изготовления промежуточных шайб. Хотя можно взять и любой другой пластик, тут главное, чтобы один лист был толще другого и по цвету подходил под будущий цвет готовых рук.

В нашем случае для изготовления шарнира запястья подошла простая сферическая мебельная ручка с родным метизом.
А так, можно шарнир выточить по подходящим размерам.
Например для шарниров некоторых моделей рук мы использовали сферическую часть крестового маховика от кран-буксы смесителя.

Для оформления деталей рук понадобится металлизированный скотч и широкая изолента ПВХ.
Для сборки деталей рук нужен тюбик клея, мы взяли клей ПВА.
Это все материалы, что нам нужны.

Чтобы собрать механические руки, нам понадобятся нехитрые инструменты и сами руки сборщиков. Ну-и конечно не помешает соображающая голова :)

Из чертежной бумаги вырезаем шаблоны деталей.
На картинке указано, количество деталей, которые нужно изготовить для создания пары рук.

Работу начнем с изготовления фаланг кончиков пальцев из гофрокартона. Сложного тут ничего нет, но аккуратность лишней не будет.
— К листу гофрокартона прикладываем шаблон и обводим его.
— Шилом размечаем центровочные отверстия.
— Ножницами вырезаем заготовки.
— Дыроколом пробиваем отверстия.
— Склеиваем заготовки в одну целую деталь.
— Ждем, когда слои клея на заготовке полностью высохнут.
— Металлизированным скотчем обклеиваем боковины заготовок.
— Канцелярским ножом обрезаем лишний скотч и прорезаем отверстия.
— Обклеиваем изолентой ПВХ торцы заготовок.
— Канцелярским ножом обрезаем излишки изоленты.
Кончики пальцев готовы.
Нижние фаланги изготавливаются по тому же принципу, что и кончики пальцев.
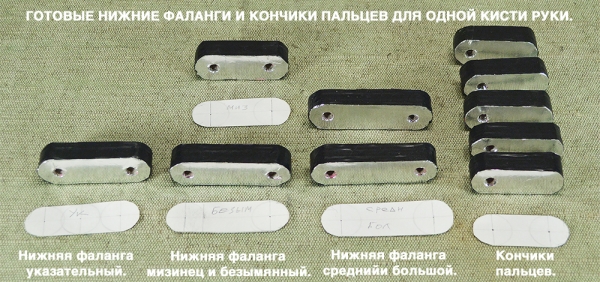
Так выглядит комплект готовых нижних фаланг и кончиков пальцев для одной руки.
Нижние фаланги отличаются по своей длинне, а размеры кончиков пальцев одинаковые.

Из листового картона изготавливаем средние фаланги пальцев.
Последовательность изготовления аналогична работе с гофрокартоном, только отсутствует этап склеивания заготовок.
Четыре фаланги одинаковые по размеру, а среднюю фалангу большого пальца сделали немного длиннее.

Из листового картона изготавливаем основание большого пальца.
Обратите внимание на маленькую хитрость — три нижних отверстия на основании сделаны овальными.
Фактически, это и есть тот самый шарнир, который позволяет механической руке по кинематике движений быть более человекоподобной.
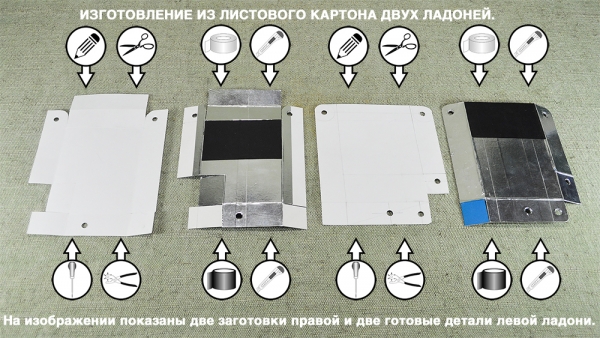
Теперь из листового картона изготавливаем детали ладоней.
Технология изготовления аналогична технологии изготовления средних фаланг и основания большого пальца.
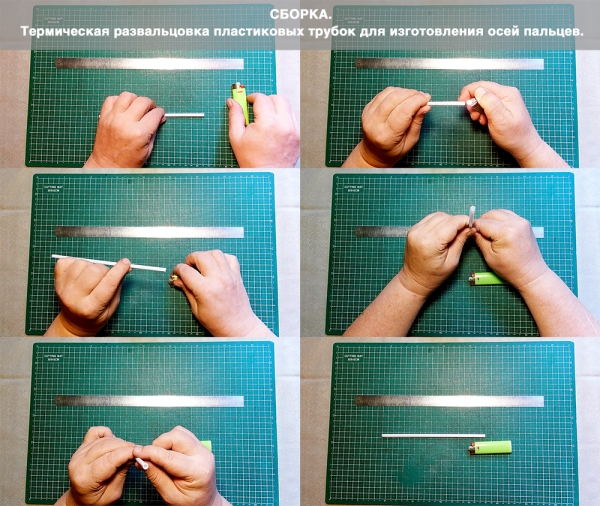
Термическая развальцовка пластиковых трубок для изготовления осей пальцев.
Хе-хе, вот же как заумно звучит-то однако. На самом деле, мы просто делаем утолщение на одном кончике пластиковой трубки при помощи зажигалки и самой обычной металлической линейки. Это утолщение нужно для того, чтобы оси не выскальзывали из своих посадочных отверстий.
Ничего сложного в этой операции нет. Главное не держать кончик трубки в самом языке пламени, а над языком и не забывать равномерно вращать саму трубку вокруг её оси. Когда кончик трубки немного оплавится, прижимаем его к металлической линейке и даем остыть несколько секунд. Вот и всё, трубка развальцована.
Размер вылета осей.
Поскольку после сборки фаланг, кончики осей будут тоже развальцовываться, то необходимо оставить припуск на трубке.
Размер припуска оси от внешнего края средней фаланги будет примерно 5-7 мм.

При помощи высечек из пластиковых кусков изготавливаем промежуточные толстые и тонкие шайбы.
Толстые шайбы будут использоваться на оси пальцев.
Тонкие шайбы будут использоваться на осях средних фаланг.
В нашем варианте внешний диаметр шайб Ø 18 мм, диаметр отверстия Ø 5,5 мм.

Итак, все детали готовы, теперь пора приступить к сборке. Саму сборку покажем на примере левой руки.
Скажем по секрету — идея снять репортаж о рукостроительстве пришла только после того, как правая рука уже была собрана.
Сборку начнем с пальцев.
— В среднюю фалангу вставляем кончик пальца и тонкие пластиковые шайбы.
— Вставляем ось.
— Обрезаем ось под размер вылета в 5-7 мм.
— Производим термическую развальцовку кончика оси.
Далее, туже самую последовательность операций проделываем с нижней фалангой пальца.
Ну вот и всё, один палец собран.
Маленькая хитрость по обработке осей при сборке пальцев.
Поскольку при термической развальцовке ось в заготовке уже так свободно не покрутишь, то обрабатывать кончик оси обычной зажигалкой не очень удобное занятие.
Лучше вместо обычной зажигалки использовать зажигалку турбо, так как у турбозажигалки факел более устойчивый и более сильный.
При любом наклоне турбозажигалки, факел остается параллельным её корпусу, а таким работать гораздо удобнее.

Точно так же собираем из заготовок фаланг и кончиков оставшиеся четыре пальца.
Собираем готовые пальцы на ось, чтобы наглядно увидеть сколько толстых пластиковых промежуточных шайб необходимо устанавливать между пальцами.
Шайбы нужны для того, чтобы между пальцами было расстояние и они не мешали двигаться друг другу.
 Собираем большой палец и его шарнир-основание.
Собираем большой палец и его шарнир-основание. Чтобы шарнир-основание не деформировался в работе, на его нижнюю ось подбираем необходимое количество промежуточных шайб. Шайбы будут находиться на оси внутри шарнира.
 Собираем ладонь.
Собираем ладонь.Со сборкой пальцев все готово, теперь пришло время собирать ладонь.
Сначала склеиваем корпус тыльной стороны ладони, затем склеиваем корпус нижней части ладони.
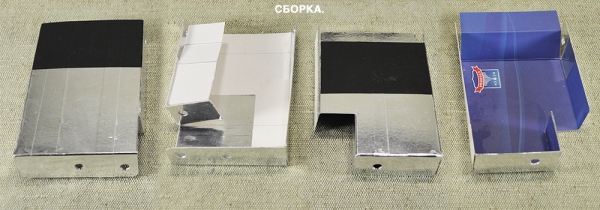
После высыхания клея, корпуса ладоней готовы к дальнейшему монтажу в них шарнира большого пальца, шарнира запястья и пальцев на оси.
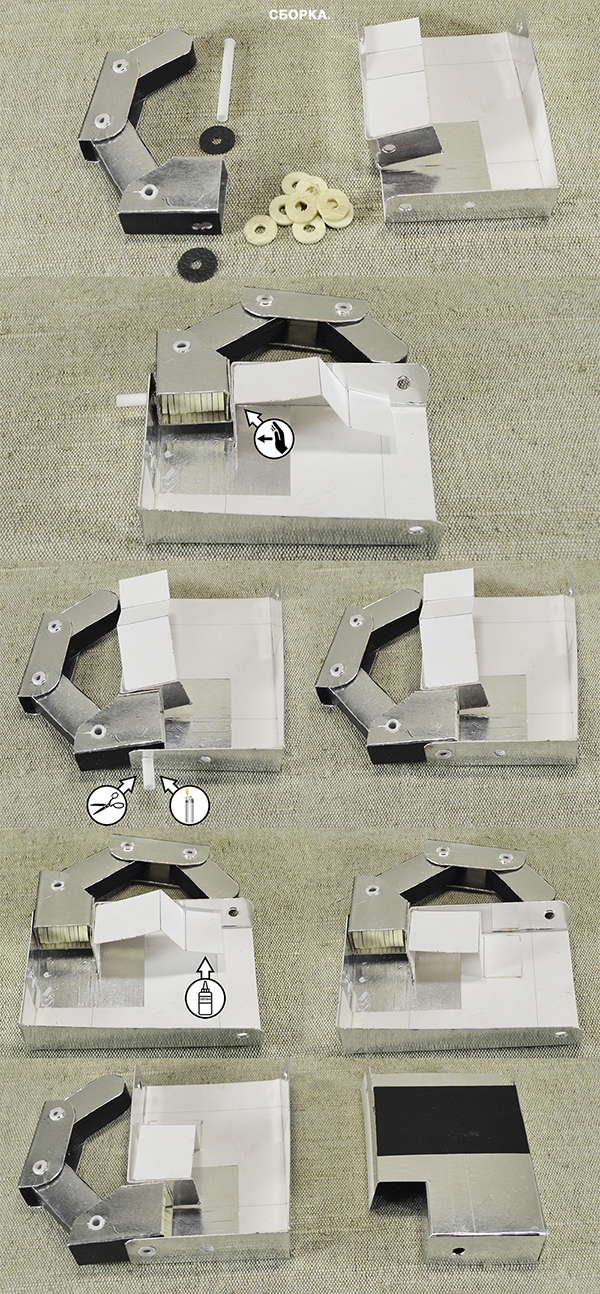
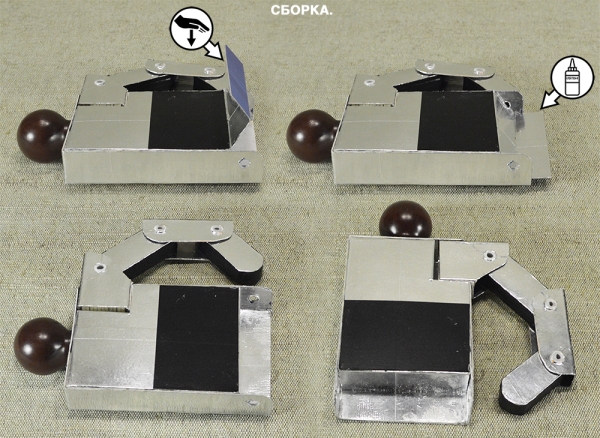
Монтируем шарнир большого пальца в корпус тыльной стороны ладони.
— Вставляем в корпус ладони шарнир, тонкие шайбы, промежуточные шайбы и ось шарнира.
— Обрезаем кончик оси под припуск в 5-7 мм и развальцовываем.
— В корпусе ладони приклеиваем на свое место опорную площадку.
Вот и всё, монтаж шарнира большого пальца в корпус ладони закончен, но сборка продолжается.
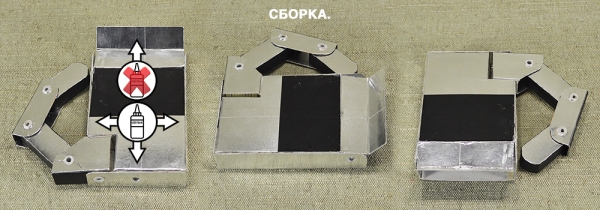
Собираем корпуса тыльной стороны и нижней стороны ладоней.
Склеиваем на чистовую три из четырёх боковин корпусов.
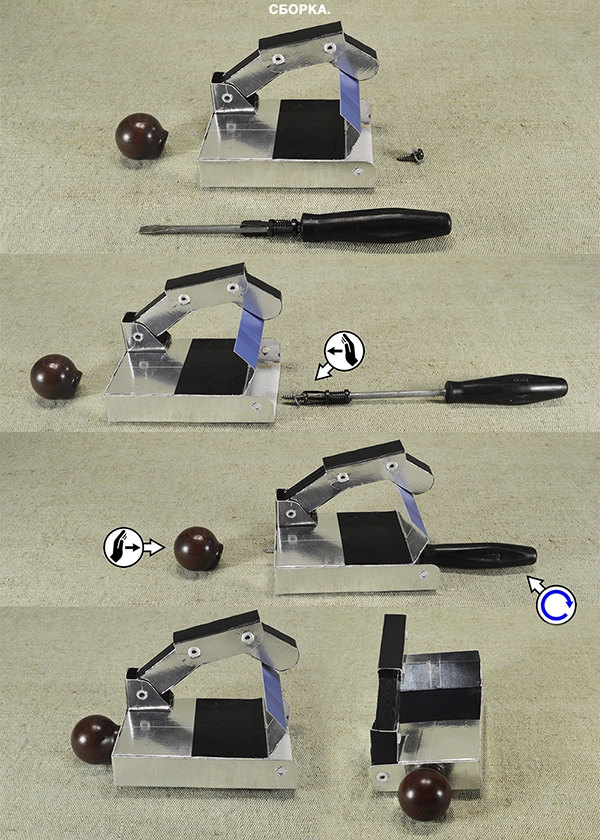
Устанавливаем шарнир запястья на корпус ладони.
— Через несклеенную сторону корпуса ладони заводим шуруп с шайбой в штатное отверстие.
— Снаружи подаем шарнир на шуруп с шайбой и прикручиваем его.
Вот и всё, шарнир запястья установлен на свое штатное место в корпусе ладони.
Далее склеиваем последнюю часть корпуса ладони.
Теперь корпус ладони можно считать собранным.
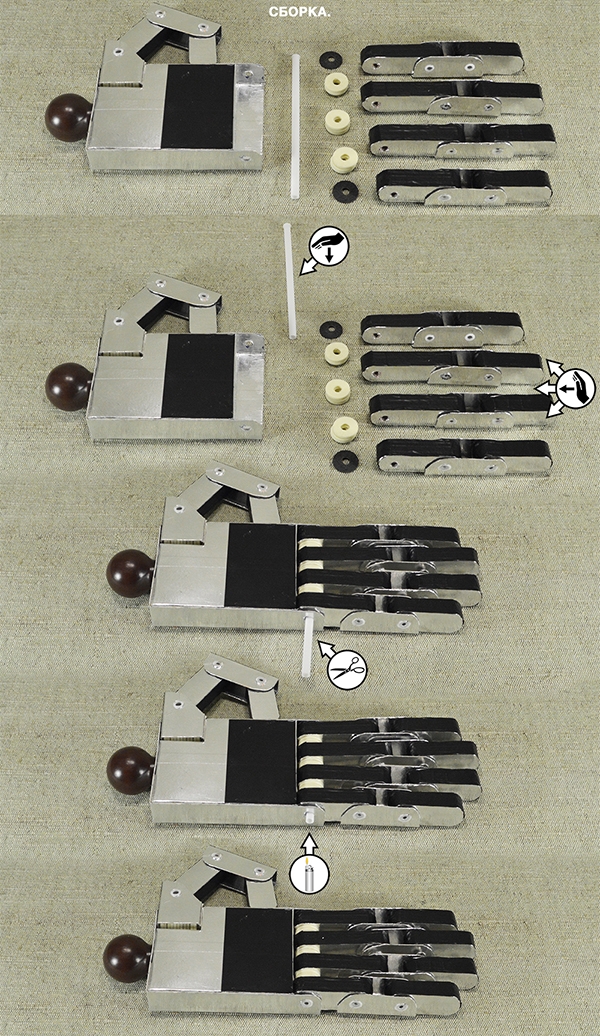
В корпус ладони монтируем пальцы.
— Сначала вставляем в корпус ладони пальцы и промежуточные пластиковые шайбы.
— Затем через боковину корпуса ладони вставляем ось пальцев.
— Обрезаем кончик оси под припуск в 5-7 миллиметров.
— При помощи зажигалки и металлической линейки развальцовываем кончик оси.
А дальше приходит откровение, что сборка руки завершена.
Теперь можно порадоваться и поофигевать от осознания этого приятного момента.

Любуемся полученным результатом и для полноты картины монтируем руки на предплечья, чтобы провести пробные фотосессию с видеосъемкой.
Конец первой части.
Продолжение следует…
9 комментариев
Зачётные кисти. Вечно мучаюсь собирая их для роботов. +
С кистями была та же проблема, после этой идеи стало проще.
Спасибо Влад :)
Про правильных руков — это всегда сложное.
Плюс, и во вторую часть тоже.
Здорово. Плюс.
Можно больше взять бутылей.
И в ладонях, даже узких,
Больше утащить закуски :)))
Спасибо :)